Les motos pourraient être détectées par les véhicules et certains accidents évités

Crée le 14/05/20 - modifié le 29/10/2020
C’est un constat qui chaque année se renouvelle, les utilisateurs de deux roues motorisés connaissent une sinistralité corporelle bien supérieure à celle des conducteurs d’automobiles. Au fil des ans, de nombreux efforts ont été accomplis pour améliorer la fiabilité des motos, l’efficacité des équipements de sécurité et de protection, la fréquence des campagnes de prévention. Mais les chiffres résistent et stagnent à un niveau décidemment trop élevé.
Un projet de recherche piloté par l’UTAC CERAM propose d’utiliser les technologies permettant à des véhicules de communiquer entre eux pour réduire cette sinistralité.
Quelle est l’étendue du problème ?
Quelques chiffres issus du bilan de l’accidentalité routière 2019 réalisé par l’ONISR :
- pour un motocycliste (usagers d’un deux-roues motorisé de cylindrée supérieure à 50 cm³) , le risque d’être tué ramené aux kilomètres parcourus est estimé 22 fois supérieur que pour un conducteur de voiture ;
- les motocyclistes représentent 19 % de la mortalité routière avec 615 personnes tuées ;
- entre 2010 et 2018, la baisse de la mortalité pour les motocyclistes est de - 1,4 % par an en moyenne (- 11 % au total), elle est deux fois plus faible que celle de l’ensemble des usagers.
Si nous nous intéressons au contexte : 56 % des motocyclistes sont présumés responsables des accidents mortels dans lesquelles ils sont impliqués. Lorsque l'autre usager est à l'origine du conflit, l’analyse de procès-verbaux d'accidents corporels révèle que dans 63 % des cas, ce dernier ne détecte pas la moto.
D’autres travaux, principalement réalisés par le CEESAR (Centre Européen Etudes de Sécurité et Analyse des Risques) ou par la NHTSA (National Highway Traffic Safety Administration), ont mis en évidence des situations particulièrement accidentogènes pour les conducteurs de deux-roues motorisés, notamment lorsqu’une voiture coupe la route d’une moto.
Si les systèmes avancés d’aide à la conduite (ADAS) se démocratisent – offre de série ou optionnelle – et équipent aujourd’hui bon nombre de véhicule sur le parc français, leur performance reste conditionnée par la portée de détection des capteurs utilisés (caméras, radars). En outre, leur efficacité se dégrade en cas d’obstacle entre le véhicule et l’objet du danger. L’apparition des technologies de connectivité offre alors la possibilité d’augmenter le champ de détection autour des véhicules.
Les scénarios du projet de recherche
Grâce à des technologies de communication intervéhiculaire, un signal est envoyé aux conducteurs (voiture et/ou moto) lors d’un risque potentiel de collision. Le calcul de la probabilité de la collision se fait à partir des positions et des vitesses instantanées des véhicules. Il s’agit dans un premier cas d’avertir le conducteur et de le laisser réagir par lui-même. Une fois que l’alerte a été envoyée, en cas d’absence de réaction du conducteur de la voiture, un automate embarqué prend les commandes pour éviter la collision. Dans ce cas la technologie permet au véhicule de réagir par lui-même au plus tôt. On s’affranchit alors du temps de réaction du conducteur (1,2 secondes) entre sa réception d’une alerte et son action finale sur le véhicule pour éviter le danger.
Quatre scénarios ont été étudiés.
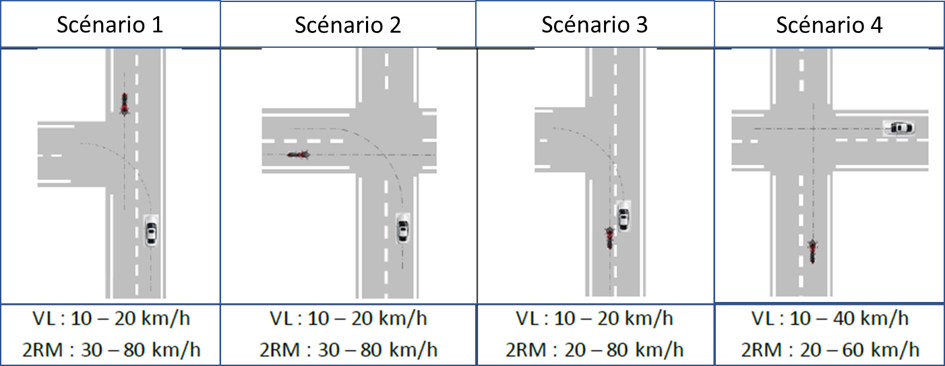
Scénario 1 : Left Turn Across Path – Opposite Direction représente une voiture s’engageant dans un tournant, tandis qu’une moto arrive en face, selon une trajectoire rectiligne. Ce scénario est une combinaison de basses vitesses pour la voiture, de 10 à 20 km/h, et de plus hautes vitesses pour la moto, de 30 à 80 km/h.
Scénario 2 : Left Turn Across Path – Left Direction est similaire au précédent, seulement la moto arrive depuis la gauche de la voiture, toujours selon une trajectoire rectiligne. Il couvre le 10 et le 20 km/h pour la voiture, contre de plus hautes vitesses pour la moto : 30 à 80 km/h.
Scénario 3 : Left Turn Across Path – Same Direction est un scénario de détection dans l’angle mort de la voiture. En effet, cette dernière engage un tournant à gauche, tandis que la moto arrive à vitesse plus élevée, derrière elle, comme un dépassement, sur sa gauche. Le panel de vitesse de la voiture est identique au scénario précédent, tandis que l’on couvre de 20 à 80 km/h pour la moto.
Scénario 4 : Straight Cross Path – Right Direction, est une intersection où les deux trajectoires de la voiture et de la moto sont rectilignes. Cette dernière vient de la droite de la voiture. Sa vitesse varie de 20 à 60 km/h, contre 10 à 40 km/h pour la voiture.
Description des dispositifs techniques
La voiture est équipée d’un boitier V2X OBU (On Board unit) de type Unex-OBU-201 interfacé au bus CAN d’une centrale inertielle. Cela lui permet d’avoir accès aux informations nécessaires à l’émission des CAMs (Cooperative Awereness Message) : position, vitesse, accélération, cap… Cette centrale est connectée à un boitier Satel afin de recevoir des précisions satellitaires de l’ordre de la dizaine de centimètres.
L’OBU communique vers l’extérieur grâce à une antenne Wifi émettant un signal à 5 GHz. Elle est reliée à un routeur Wifi afin de transmettre les informations à une tablette embarquée. Celle-ci constitue l’interface avec le conducteur et l’informe sur la position des 2 véhicules en temps réel. En cas de risque potentiel, une alerte visuelle et sonore apparait pour capter l’attention du conducteur.

La moto qui a été utilisée est une cible officielle Euro NCAP. Elle a l’avantage d’être impactable sans dommages préjudiciables pour la voiture, tout en étant très peu altérée au cours de ces chocs. Elle garde ainsi ses caractéristiques de départ. La cible est composée de deux éléments : une plateforme contrôlée à distance jusqu’à 50 km/h permettant d’imprimer une trajectoire précise et répétable grâce à sa centrale inertielle, sur laquelle on installe un ersatz de moto en mousse. Cet élément a la forme d’une moto et est interprété par les dispositifs de détection équipant les véhicules comme tel.
La moto est équipée d’un boitier V2X de type Unex-RSU-101. Cette RSU (Road Side Unit) communique vers l’extérieur grâce à deux antennes Wifi émettant un signal à 5 GHz.

Les résultats de l'étude sont prometteurs
Les conclusions du projet sont les suivantes :
• les actions en direction de la moto, alarme ou action directe de freinage, fonctionnent mais amènent de la dangerosité : surprise du pilote de la moto et zone d’arrêt de la moto au milieu de la chaussée ;
• pour ce qui concerne la voiture, les systèmes de détection et de prédiction de trajectoires fonctionnent bien dans la plupart des cas et avertissent le conducteur suffisamment tôt pour lui permettre de réagir et d’éviter la collision ;
• en utilisant une alerte conducteur, il existe des combinaisons (scénarios*vitesses des véhicules) où l’impact reste non évitable car l’émission de l’alerte trop tardive ne laisse pas le temps au conducteur de réagir ;
• en utilisant le freinage automatique, les collisions sont évitées dans tous les cas sauf pour des vitesses de la voiture au-delà de 70 km/h pour le cas où la moto se situe dans l’angle mort (LTAP-SD) ;
• pour les scénarios de croisement (LTAP-LD et SCP-RD) les alertes sonores à bord de la voiture fonctionnent trop en anticipation de la collision. Bien que la moto ne soit pas encore visible par le conducteur, ce dernier est averti d’une collision imminente beaucoup trop tôt. Un tel système d’alerte ne serait probablement pas acceptable sur la route, où l’on envisage que de multiples véhicules communiquent entre eux. Chacun serait alors averti d’un grand nombre d’hypothétiques risques, sans cesse, ne laissant alors pas émerger le vrai risque critique pour lequel le conducteur devra réagir.
Les tests nécessitent des signaux GPS précis pour fiabiliser les calculs de prévision de collision. Les conditions expérimentales déployées par l’UTAC-CERAM utilisent les capacités actuelles, de l’ordre du mètre. Les anticipations de collisions et les réactions des véhicules devraient bénéficier des améliorations prévues dans le positionnement GPS dans les prochaines années.
Les communications ont utilisé la technologie ITS-G5. Aucune réglementation à ce jour n’a été intégrée dans les standards Européens (Norme ETSI). Le signal est sensible aux interférences et peut être perturbé par une surcharge d’émissions dans le cas où de nombreux véhicules, motorisés ou pas, se trouvent à proximité.
Il est estimé que cette étude couvrira 35% des motocyclistes blessés lors d’un accident avec une voiture et 27% des tués. Les potentialités en termes de sauvegarde de vies humaines sont réelles. Avant d'y parvenir, il reste encore à parcourir une longue marche de maturité technologique.


