Repérer les motos pour éviter de les percuter : c’est l’un des enjeux de la connectivité entre véhicules. Une technologie qui reste à affiner
Créé le 21/09/18, modifié le 01/12/20
Les motos sont les principales victimes des accidents de la route. Entre autres parce que, bien souvent, les automobiles ne les voient pas… ou trop tard.
L’un des apports majeurs de la connectivité (en particulier des systèmes dits V2X) est d’informer les conducteurs de la position géographique des autres usagers, comme les motos.
Pourquoi développer cette technologie, alors que de plus en plus de véhicules sont, aujourd’hui, équipés de systèmes d’aide à la conduite (ADAS) ? Parce qu’aussi performants soient ces ADAS, la portée de détection de leurs capteurs reste limitée.
L’avantage de la connectivité réside là : augmenter le champ de vision du véhicule et capter le danger très en amont, malgré des obstacles et indépendamment des conditions météorologiques.
Une technologie assez fiable… si le GPS est précis
Les systèmes V2X permettent aux véhicules d’envoyer des informations aux usagers de la route qui évoluent à proximité. Ces messages contiennent de multiples paramètres sur le positionnement, le mouvement et l’état lié au véhicule émetteur : accidenté, en déplacement ou à l’arrêt. Chaque véhicule procède ainsi à un traitement algorithmique des données reçues pour prévenir les situations dangereuses, voire les collisions.
La qualité de service des dispositifs V2X est très dépendante de la précision des systèmes GPS. Pour un fonctionnement optimal, les V2X nécessitent un traitement fiable et précis des données afin de donner au conducteur les informations les plus pertinentes. Les essais fonctionnels sont donc essentiels pour calibrer au mieux ces informations.
Un système communautaire, d’autant plus efficace que le nombre d’utilisateurs équipés est élevé
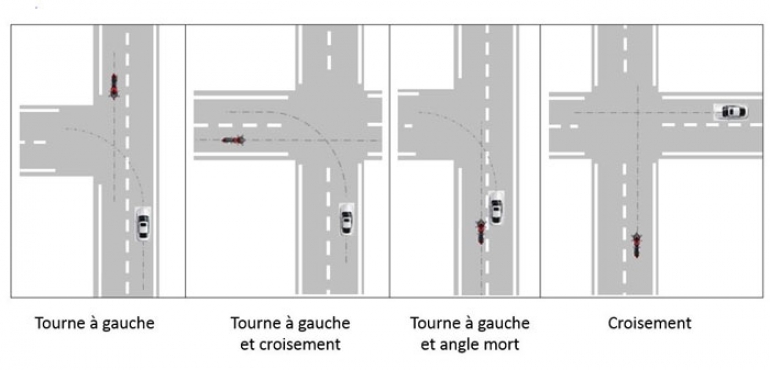
UTAC CERAM a testé l’efficacité du système sur quatre scenarios accidentogènes impliquant une voiture et une moto dans un croisement. Pour le détail des scénarios, lire Connectivité autos-motos pour plus de sécurité et La communication inter-véhicule au service de la sécurité.
Le V2X fonctionne plutôt bien. Notamment dans les cas où moto et voiture se croisent à la perpendiculaire. Car dans ce scenario la vision des capteurs est souvent obstruée par des obstacles. L’alerte envoyée aux usagers permet d’éviter les collisions mais elle peut être un peu tardive ou, au contraire, trop précoce. Reste donc encore à trouver les délais de réaction adéquats.
Au-delà de ces essais fonctionnels, l’efficacité du V2X repose sur le degré d’équipement de la population. Les systèmes V2X sont en effet communautaires. Plus il y a d’utilisateurs équipés, plus ils sont efficaces. Non seulement chaque véhicule en circulation, mais aussi les éléments d’infrastructure. Et il faut aussi que tous ces équipements soient en bon état de fonctionnement, avec peu de latence et une précision acceptable. Cela signifie que l’on a encore quelques années à attendre avant que ces systèmes puissent être vraiment performants.
Traiter l’information et se mettre d’accord
Une fois les informations émises par le V2X, au moment opportun, reste à les traiter : de façon manuelle ou automatique. Manuelle, le conducteur reçoit une alerte sonore ou visuelle. Automatique, le véhicule réagit par lui-même. La première option est suffisante dans les trois quarts des cas. Mais lorsque le conducteur ne réagit pas assez vite, la seconde option est à considérer.
Si cette prise de contrôle est envisageable sur une automobile, elle l’est beaucoup moins sur une moto, où l’équilibre est plus précaire et où le freinage d’urgence automatisé peut être source de chute.
Les technologies sont prêtes. Il faut maintenant affiner la programmation, préciser les stratégies, et se concerter entre constructeurs, autos comme motos. Jusqu’ici les initiatives restent isolées.
Euro NCAP a prévu, d’ici 2025, des essais d’évaluation de systèmes V2X, soit seuls, soit combinés à des ADAS. Cela donnera assurément un coup d’accélérateur à la connectivité.
Patience, motards, et en attendant, restez vigilants !
A lire aussi :
Organismes de recherche et partenaires
L’UTAC-CERAM - avenue Georges Boillot à Linas (91310),
Principaux intervenants
Théo CHARBONNEAU - Responsable d’Activité Grands Projets, Comportement véhicule & Sécurité Active - ADS
Date de début / Durée
Septembre 2018
A voir aussi

La communication inter-véhicule au service de la sécurité
Les motos pourraient être détectées par les véhicules et certains acci...
Véhicules « autonomes » : en progrès mais pas fiables à 100 %
Les aides à la conduite sont de plus en plus performantes mais le véhi...